

In this post, I aim to review some instruments that we use very frequently when working on seagrass ecology. Since the range of instruments and deploying techniques vary so widely, I only aim to cover the ones I found more useful when working in shallow soft bottoms. Instrument deployment will vary depending on the size of the instrument, the water depth and the type of bottom. Depending of the position of the instrument in relation to the water column, the deployment structure will vary. Below you might find some ideas to help you in the next instrument deployment.

One of my favorite designs to deploy instruments at sea is to attach a buoy to the instrument that remains below the sea surface. This allows to find the instrument while snorkeling without the need to search in the bottom. This is particularly useful when the water visibility is low or when the instrument is deep (> 10m). The location is always marked with a GPS waypoint. I always use two markings, one with the boat GPS and a second with a handheld GPS (Garmin, GPSMAP 62s). In case that one fails during the recovery, I still have the second ready to go. In addition, for a quick location of the instrument at sea, a second buoy is located a few meters away to mark the position. In case that somebody pulls or remove the marking buoy the instrument will not be affected. If the marking buoy is not present when searching for the instrument, we will use the GPS coordinates to locate the instrument.
Light Measurements
Light measurements can be done easily by deploying light loggers at the seabed. I mainly use Hobo Temp/Light loggers and Odyssey PAR loggers. The HOBO loggers are very inexpensive (80 Eur) and can be easily maintained. The battery (CR2032) can be replaced by removing two screws and new housings can be purchased. Since light measurement are influenced by the quality of the housing, been able to replace them is an advantage. The measurement are in Lux and the accuracy is not great, but for the low price of the instrument it allows to deploy many so it is easier to study multiple sites at the same time. To perform more accurate measurement I use Odyssey PAR loggers which are a bit more expensive (250 Eur) but the accuracy is better. On the other hand, Odyssey PAR loggers have a battery that is difficult to replace and the software is not so intuitive as HOBO.
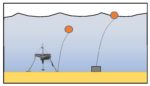
We usually deploy these loggers to measure light and calculate the light attenuation coefficient (Kd), which is a key parameter when working with underwater vegetation. See below how we deploy and measure Kd. L1 is light at the surface, L2 is light at the bottom and d is the distance between the sensors in meters.

Hydrodynamics
Waves and currents can be measured by deploying acoustic or pressure loggers. The two type of loggers I mainly use are a pressure sensors and an acoustic Doppler velocimeters also know as ADVs. Both have advantages and disadvantages but for me, they have work very well over the last years.
Pressure sensors such as RBR Solo Dwave 16 are very robust and small. The pressure sensor mainly measures wave height and wave period which are very useful parameters to do multiple hydrodynamic calculations. The drawback is that the wave direction can not be measured but its not a big deal if the interest is to know how wave exposed is a site. The batteries are simple AA of 3.6V that can keep the instrument running for 1 year at measuring burst of every 1 hour. The sensor have a USB-C conector which allows to download the data fairly fast. The cost of the sensor is 3,500 Eur, which is less 4 times less expensive than the ADVs. I usually deploy them in concrete blocks that I lower to the bottom. This is safe, inexpensive and very stable structure. See image below.
We use mainly the acoustic Dopplers such as the Vector ADV (Nortek), which is very robust oceanographic instruments which provide very reliable data measurements. They measure flow velocity in a single small cell and also measures pressure. The range of scientific possibilities with ADVs are huge since its possible to measure turbulence due to the high speed sampling. The cost of the instrument is also huge, between 12,000-15,000 Eur. The battery packs are rechargeable and can be easily replaced by opening the instrument. The instruments can be deployed in looking up, down, or sideways. It is very important that the instrument is very stable since oscillations could affect the data quality. See deployment set ups in Infantes et al. (2011) and Infantes et al. (2012)


Salinity
Salinity measurements can be easily performed with a HOBO Conductivity logger. The instrument records water conductivity and water temperature to later calculate the salinity. The calculation is done using an utility built in the HOBO desktop software, which requires the HOBOware Pro version to perform the calculation. The instrument cost about 750 Eur. The batteries need to be replaced by HOBO since they are welded into the instrument, but they can last 2-3 years. Data can be downloaded in the field using the HOBO waterproof shuttle (250 Eur), which uses an optical sensor to transfer the data between instruments. We regularly use the shuttle to download the data from the Light/Temperature sensors and from the conductivity logger. Then, back in the lab, we connect the shuttle into the computer (windows and Mac) with an USB cable to download the data. We deploy the conductivity loggers inside PVC tubes with holes. The tube reduce the fouling on the sensor while the holes allows water flow for the measurements.

Maintainance
When instruments get into the water, they start hosting a wide range of fouling organisms which can affect the precision of the measurements. For this reason, instrument will require to be cleaned regularly, specially if instrument use an optical sensor (eg. turbidity, light). Some other instruments can accommodate a wiper which automatically cleans the sensor between each measurement. Sometimes is not possible to clean the instruments regularly if they are deployed in remote locations. In that case. only the data of the first few weeks will have enough quality to be used. For example, during the summer in Sweden we calculated that about 2 weeks of data collected with the HOBO light loggers will have the right quality to be used. After 2 weeks the instruments are too fouled. In contrast, in winter when fouling is lower (due to low light and cold water), the instruments require less cleaning maintenance. See images below.

Instrument recovery
We usually recover the instruments by snorkeling or scuba diving. After locating them, if instruments are large or heavy and can not be transported safely by the divers, moorings or instruments can be pulled into the boat using ropes, lifting balloons or cranes. To identify where the instruments are located we will use the marker and mid-water buoys as explained at the start of this post. If it’s not possible to locate the buoys, then we will use the GPS coordinates. We will moor the boat near the instrument to facilitate the recovery operation. Then a diver or snorkeler usually ties a rope to the instrument. Divers will report if the instrument has suffer any visual problem during the deployment (eg, instrument is lying in the bottom, signs of damage, fouling, burial). If a GoPro camera is availale, divers can take some footage of the instrument. Any sign of a problem could help to deal with the data later on. If the instrument is small it could be lifted from the boat, but when dealing with a larger instrument or deployment structure, >30 Kg, then a lifting balloon will facilitate the recovery. When using lifting balloons special care must be taken by divers, if the diver is entangle in the instrument a quick ascent to the surface could create an accident. In addition, if the balloon fails during the ascent the instrument can quickly sink down and knock or trap the diver.
Once the instrument is back at the boat, its important to check the sensors. I like to take photographs of the instruments after recovery, to document any possible cause that might have affected the sensor and the quality of data (eg. fouling, sediment, etc). Then rinsing the instrument with fresh-water and cleaning the instrument is important to keep it working well in the future. Afterwards, I will download the data from the instrument and check its quality. Then is when the data analysis work really starts!!
 recovery in Mallorca")
It is always a pleasure and a nice sense of achievement when good data has been collected using underwater sensors deployed at sea. I wish you good luck in your next deployment!!











Hi Eduardo, I’m looking to start some restoration mapping in Delaware and I’ve got two quick questions I’m hoping you can answer . Do you convert your lux measurements from the HOBO pendants into PAR before you take the coefficient of light attenuation, or can you just use the lux measurements since its a relative difference? Second, do you calculate Percent light at bottom with your coefficient of attenuation as well? Thanks!
Hi Andrew, that is very interesting. I usually calibrate the HOBOs before deployment using a PAR meter (Licor, Apogee, etc). Then I calculate the coefficient of light attenuation using the PAR values. There is a nice article on this (Long et el. 2012). But you can test with the lux and see if you get good values too, please let me know if you do!
We use the light attenuation coefficient to calculate the light in the bottom. Since we place the two sensor with about 1m, with the bottom sensor about 20cm from the bottom, we can get a good value for the water column near the bottom. We make the assumption that the turbidity in the water column is the same and we extrapolate.
But remember to clean the HOBOs frequently, this is the most important to get good data quality. Also make sure you measure well the distance to the bottom of each sensor, which is key for later calculations. Good luck!!