

Fluid dynamics for benthic ecology
Fluid dynamics play a crucial role in the study of marine ecosystems, and their understanding is essential for ecologists conducting scientific research in these environments. Waves and currents impact coastal habitats directly, influencing their physical structure, flow patterns, shear bottom stress and substrate stability, crucial for species distribution. Additionally, hydrodynamics govern transport processes like sedimentation, nutrient cycling, and larval dispersal, fundamental for ecosystem function. They also shape biological interactions, affecting behaviors, feeding strategies, and community dynamics of marine organisms. Understanding wave dynamics is crucial for assessing coastal resilience, predicting critical thresholds, and identifying conservation priorities in the face of climate change and human disturbances.
Fluid dynamics is the study of the movement of fluid. Among other things, it addresses velocity, acceleration, and forces exerted by or upon fluids in motion. In this blog post, a review is provided of the basic concepts of fluid dynamics that affect the life of macrophytes. Linear wave theory, wave propagation and benthic boundary layers are summarised.
Waves
Water flow in coastal marine ecosystems can be divided into unidirectional and oscillatory flows. Unidirectional flows (also described as currents) are those in which water particles tend to move in the same direction over time. These flows in marine ecosystems are mainly generated by tides. Oscillatory flows (also described as waves) are those in which water particles move in two directions at a periodic interval. These flows are generated by waves. Depending on the dominance of wave periodicity, a marine ecosystem can be characterized as tide-dominated or wave-dominated. This blog post is mainly focused on wave-dominated flows, and for simplicity, the currents and tides characteristics will not be reviewed in this post.
Wind generated waves are formed by the frictional stress produced by two fluid layers of different speed, which creates a transfer of energy from the wind to the water surface. Wind-generated waves are surface waves that occur on the ocean, sea, lake, rivers, and canals or even on small puddles and ponds. Wave size depends on the wind speed blowing over a distance of sea surface (known as wind fetch) for a lenght of time. Here is a useful online wave calculator to estimate wave conditions using known wind speeds and fetch, but remember that bathymetry and bottom slope will affect the propagation of waves too as you will see below.
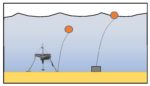
Wave data can be obtained by direct measurements of the sea conditions using oceanographic instruments or estimated using numerical models. Check an early post on instrument deployments at sea. Oceanographic instruments are used to measure waves such as pressure sensors, accelerometers, acoustic dopplers, radars or altimeters mounted on satellites. Instruments can be deployed anchored at the sea bottom or fixed at meteorological buoys or at the shore. Wave records are generally very limited in space and time due to the cost of the instruments and measuring platforms. Also, waves are usually recorded on a specific location over a period of time. For these reasons, numerical models are used to estimate the wave conditions in locations where wave measurements are not available. In order to obtain a wave field over larger portions of the sea surface area where wave measurements are not available, numerical models are used. Numerical models are widely used, for example, to estimate wave fields over the Mediterranean Sea (Cañellas et al. 2007), to study a specific coastal area with an ecological, economical or turistic interest (Álvarez-Ellacuria et al. 2009, Álvarez-Ellacuria et al. 2010).
Waves are characterized by wave height H (from trough to crest) or wave amplitude a (half of the wave height), wavelength L (from crest to crest), wave period T (time interval between arrival of consecutive crests at a stationary point) and wave propagation direction (Fig. 1). Waves in a given area typically have a range of heights. For weather reporting and for scientific analysis of wind wave statistics, their characteristic height over a period of time is usually expressed significant wave height, Hs, which represents an average height of the highest one-third of the waves in a given time period. The angular frequency is ω = 2π/T, and the wave number is k = 2π/L.
Airy wave theory or linear wave theory gives a linear system description of the wave propagation of gravity waves on the surface of a homogeneous fluid layer. The theory assumes that the fluid layer has a uniform mean depth and that the fluid flow is inviscid, incompressible, and irrotational. Linear wave theory uses a potential flow approach to describe the motion of gravity waves on a fluid surface. In nature, a combination of waves and currents is present, but for simplicity, we deal with them independently.

Figure 1. Diagram of a shoaling wave approaching to shore. Wave height (H), wave length (L), water depth (d) and wave celerity or speed (C).
| \[ \omega^2 = gk \tanh(kh) \] | [1] |
| \[ L = \frac{T^2 g}{2\pi} \tanh\left(\frac{2\pi h}{L}\right) \] | [2] |
| \[ C^2 = \frac{g}{k} \tanh(kh) \] | [3] |
| \[ C = \sqrt{gh} \] | [4] |

Figure 2. Transition between shallow, intermediate and deep waves
| \[ u_b = \frac{2 \pi a b}{T} \] | [4] |
where ab is the wave orbital amplitude calculated as
| \[ ab = \frac{H_s}{2 \sinh\left(\frac{2\pi h}{L}\right)} \] | [5] |
where L is calculated iteratively from Eq 2.
Orbital velocities can also be measured from instruments deployed in the seafloor. Records from acoustic doppler velocimeters (ADV) provide large datasets to calculate velocity and turbulence. Field records are usually filtered to remove spikes and low beam correlations. Then velocity data can be filtered with a low pass filter to remove high frequency Doppler noise (Lane et al. 1998). Horizontal flow velocity is calculated as the root mean square (rms).
| \[ U_{\text{rms}} = \sqrt{\frac{1}{N} \sum_{i=1}^{N} x_{i}^{2} + y_{i}^{2}} \] | [6] |
where x and y are the two horizontal velocities.
Wave energy possessed by a wave is in two forms, kinetic and potential. Kinetic energy is the energy inherent in the orbital motion of the water particles, while potential energy is possessed by the particles when they are displaced from their mean position. The total wave energy E per unit area is
| \[ E = \frac{1}{8} \rho g H_{s}^{2} \] | [7] |
Wave propagation
As water waves propagate from the region where they were generated to the coast, both wave amplitude and wavelength are modified due to refraction (e.g., changes in bathymetry or interactions with wind-induced currents), diffraction (e.g., intense variations of the bottom), the loss of energy due to shoaling, wave damping and finally wave breaking. The surf zone is a highly dynamic area where energy from waves is partially dissipated through turbulence in the boundary layer and transformed in short and long waves, mean sea level variations and currents. Therefore, the energy dissipated in the surf zone is used for sediment transport providing a highly variable morphological environment (Dean and Dalrymple 2002).
Early efforts to study wave transformation from deep to shallow water were based on the geometrical ray theory. As a modification to linear wave theory, the mild slope approach, which assumes that the water depth changes slowly in a typical wave length, appears as an improvement over the former since it includes wave diffraction. In this approach, the vertical structure of the velocity is the same as that for a progressive wave over a constant depth, with the governing partial differential equations of the elliptic type. Moreover, these equations can be easily converted into parabolic type by assuming that the wave amplitude is primarily a function of water depth due to shoaling. This approach, known as the parabolic approach, can be seen as a modification of the ray theory where wave energy can be diffused along the rays as wave propagate (Liu and Losada 2002).
Boundary layers
The purpose of studying benthic boundary layers in ecology is to understand the water movement around organisms that live on or near the substratum. The boundary layer is the layer of fluid in the immediate vicinity of a bounding surface where effects of fluid viscosity are considered in detail. The boundary layer effect occurs in the field region where all changes occur in the flow pattern. The boundary layer distorts surrounding non-viscous flow. It is a phenomenon of viscous forces. This effect is related to the Reynolds number. The thickness of the boundary layer, δ, is normally defined as the distance from the solid body at which the flow velocity is 99% of the free stream velocity, which is the velocity calculated at the surface of the body in an inviscid flow solution.
When benthic marine macrophytes are present, the boundary layer is modified by the canopy, which influences the mean velocity, turbulence and mass transport (Nepf and Vivoni 2000, Ghisalberty and Nepf 2002, Luhar et al. 2010). Macrophytes reduce the flow velocity near the bottom, altering the logarithmic velocity profile (Fig. 3).

Figure 3. Vertical profile of flow velocity interacting with a seagrass meadow. Top, weak currents (black line) and fast currents (dashed line). Bottom, velocity reduction due to benthic macrophytes.
| \[ \text{Re} = \frac{u \cdot l_*}{\nu} \] | [8] |
| \[ F_D = \frac{1}{2} \rho A f C_D u^2 \] | [9] |
Related research articles









Leave a Reply